随着我国装备制造业转型升级,在市场需求和技术进步双重作用下,近几年来工业机器人与数控机床集成应用发展很快,应用的形式不断扩展,对当前机床智能化潮流带来新的促动,对我国机床工具行业的转型升级也必将起到有益的推动作用。
鉴于机器人研制以及与机床集成应用的发展现状,相关企业应如何建立有效的组织联络机制,以加强沟通与合作,两个行业融合发展该建立怎样的技术规范与标准,以充分做到资源共享与优势互补,并形成产业发展的合力!
机床制造过程中许多岗位主要依赖工人的体力和技能,生产效率低、劳动强度大、缺少熟练技工人才,难以保障产品稳定性和一致性,促使机床行业越来越多地采用工业机器人及智能制造技术来改造传统工艺流程。以往,昂贵的进口机器人和生产线主要在汽车等少数行业使用,在机床行业等装备制造业领域应用比例偏低,很大程度上制约着国内机床行业自动化程度的提高。
机器人产业正迎来黄金发展机遇期,如何推动工业机器人产业和机床工具产业的融合发展,如何做到工业机器人与数控机床的互为集成应用,已成为哈工共哲机器人重点研究的项目。
随着用工成本上涨、技能人才缺少、高危环保、高强度作业等问题的凸显,工业机器人参与生产制造已被广泛认知和不断使用,成为社会关注的焦点。政府更是借此促进产业转型升级,企业用其开展技术改造,转变生产方式,提高作业效能。然而,中国的机器人保有量不大,综合竞争力有待提升。那么,机器人行业将以什么样的模式向前发展?小编认为,现阶段更需要机器人整机企业、机器人关键部件供应商、机器人集成商产业链的协同发展。
哈工共哲机器人自创立以来,一直重点研究实际生产中机器人的应用,除传统的焊接应用外,机器人在机床上下料、物料搬运码垛、打磨、喷涂、装配等领域也得到了广泛应用。金属成形机床是机床工具的重要组成部分,成形加工通常与高劳动强度、噪声污染、金属粉尘等名词联系在一起,高温高湿甚至有污染的作业环境使得这个岗位招人困难。哈工共哲机器人与成形机床集成,不仅可以解决企业用人问题,同时也能提高加工效率和安全性、提升加工精度。
那工业机器人和数控机床是怎么配合工作的?又是需要哪些专用夹具是分别应用到机械手和数控机床上的?这里以FANUC机器人为例,为大家介绍一下。
1、电机外壳加工生产线上的配合应用
FANUC机器人在电机外壳加工生产线上的应用过程,采用机器人自动上下料技术及利用iRVision视觉系统,合理地规划机器人运动轨迹,把工业机器人搬运技术及数控机床加工技术有机地组合起来,实现自动装卸工件、自动码放加工成品,实现产品的高精度、高效率和低成本加工。
自动加工生产线配置了两台FANUC Robot M-20iA搬运系统机器人,其中一台机器人作为行走机器人R1,使用FANUC伺服电动机αiF12/3000控制,通过精密减速机、齿轮及齿条进行传动,重复精度高,可以轻松适应机床在导轨两侧布置的方案。
主要用于毛坯工件的抓取、机床上料、加工工序间工件抓取以及加工成品卸除并运送到传输带上。
另一台固定机器人R2结合FANUC独有的智能机器人技术(iRVision视觉功能),用于下料,在料筐里码放加工成品。
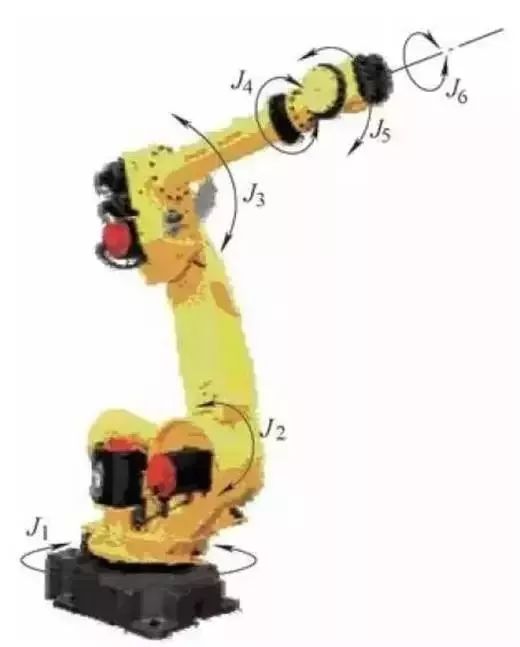
FANUC Robot M-20iA机器人各环节每一个结合处为一个关节点或坐标系,其外形及各关节位置如下图所示。
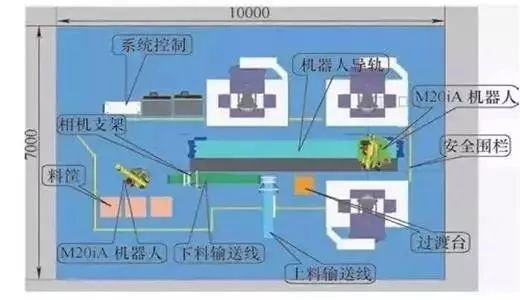
2、自动加工线设备布置
电机外壳自动加工生产线由上料输送带和下料输送带(分别配置iRVision视觉系统)、行走机器人R1(导轨式)、固定机器人R2、两台VM850立式加工中心、一台CLX360数控车床、成品料筐和系统控制柜等组成,各设备布置如下图所示。
3、数控加工工艺
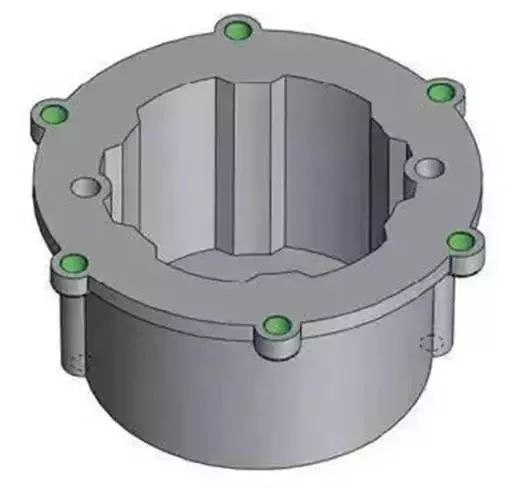
工件为电机外壳, 如下图所示, 为大批量生产, 材料是ADC12铝合金。加工内容包含端面铣削钻孔、攻螺纹和内孔车削等内容。

零件加工工序内容分配如下:
(1)VM850立式加工中心1进行M4螺纹底孔钻孔、M4螺纹攻螺纹及铣削外圆凸台工序加工,如下图所示。

(2)VM850加工中心2进行钻6个φ 5.5mm的通孔、孔口倒角工序加工,如下图所示。
(3)CLX360数控车床进行内孔及台阶孔、孔口倒角工序加工,如下图所示。

此外, 还需要设计专用夹具, 加工中心夹具采用内夹方式,数控车床采用外夹方式。
4、机器人自动上下料动作设计
根据工件的外形特点设计机器人气动手爪部件,包含气动、传感器及机械部件等。工件加工工艺流程如下:
①毛坯工件摆放在上料传送带上。
②行走机器人R1复合手爪抓取毛坯工件,行走到加工中心位置,将工件安装到加工中心的专用夹具上,如下图所示。
③待加工中心1加工完成后,行走机器人R1复合手爪取下工件,行走到加工中心2位置,将工件安装到加工中心2的专用夹具上,如下图所示。
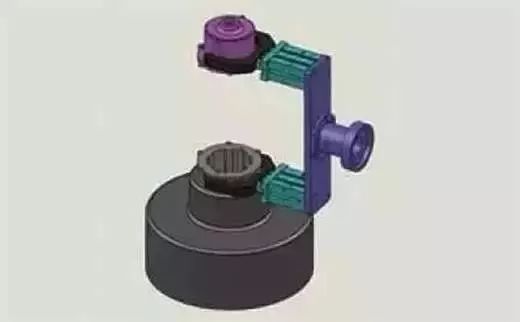
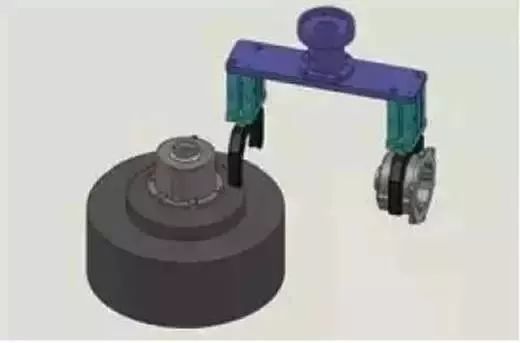
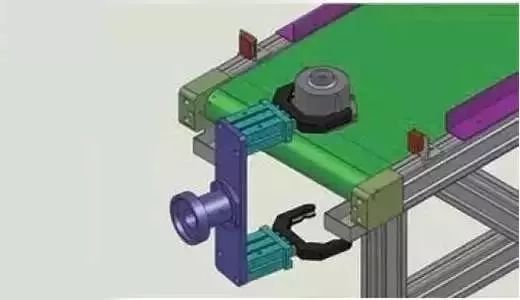
④待加工中心2加工完成后,行走机器人R1取下工件到数控车床位置,将工件安装到专用夹具上,如图9所示。待工件加工完成后取下工件,机器人行走到工件翻转台位置,进行工件翻转、交换,如下图所示。
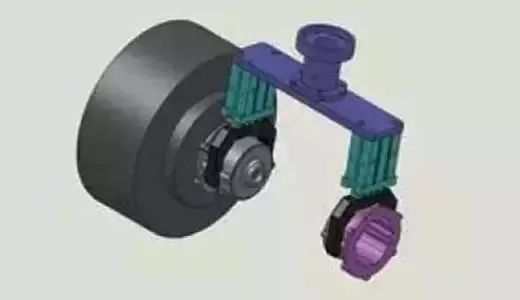
⑤工件在翻转台进行交换后,机器人R1把加工成品放置在下料传送带上,如图11所示,由机器人R2进行工件下料、自动码放在成品料筐中,如下图所示。
至此,结束一个完整的加工流程。各加工工序有相应的节拍,经过调整CNC加工程序以及机器人动作程序后,可实现数控机床加工与机器人上下料的完美组合。
5、专用夹具设计
依据三台数控机床各自的加工工序任务,设计三套组合气动夹具,介绍如下。
(1)立式加工中心1专用夹具:立式加工中心1进行钻孔、攻,如下图所示。
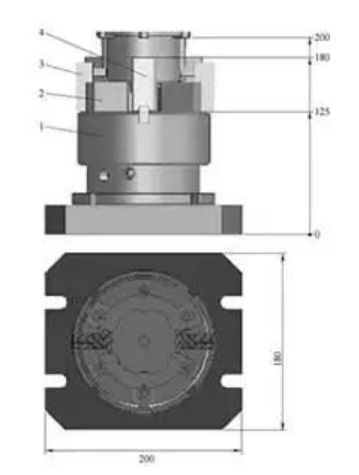
(2)立式加工中心2 专用夹具:立式加工中心2进行钻6个φ 5.5mm的通孔、孔口倒角工序加工,设计以气动三爪自定心卡盘夹紧工件,以两个弹性V形块定向的夹具,如下图所示。
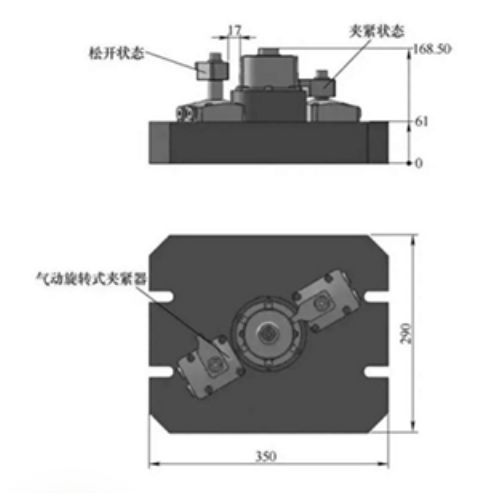
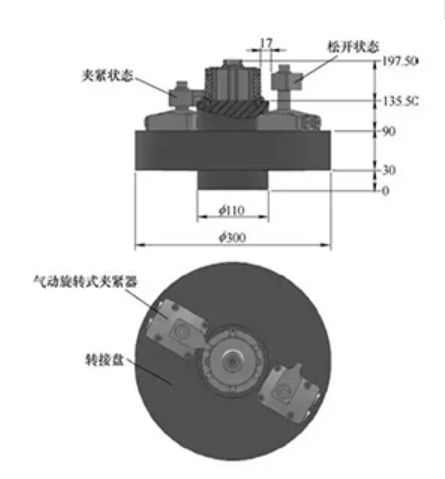
(3)数控车床专用夹具:数控车床进行内孔及台阶孔、孔口倒角工序加工,设计以一面两销定位工件、以气动旋转夹紧器夹紧方式的夹具。
6、机器人、PLC与数控机床的接口
为保证机器人与数控机床的安全配合,要建立机器人、PLC以及数控机床之间安全可靠的通信连接。
在硬件方面,通过屏蔽电缆将三者之间相应的输入与输出点进行连接。软件方面,通过机器人专用软件、PLC接口,采集机床和机器人当前状态,编写相应的符合上下料逻辑的控制程序,达到数控机床与机器人的有效通信。
重点需要处置紧急停止信号、数控机床准备完成信号、机器人手爪气动信号、数控机床夹具松夹信号以及安全门信号等,数控机床状态监控画面如下图所示。
二手工业机器人服务商:http://www.robot-renew.com 哈工共哲机器人